Características:
- Voltaje de operación: 5V – 12V
- Consumo de corriente: 500 mA
- Temperatura de operación: -20°C – 85°C
- Largo: 3.4 cm
- Ancho: 3.2 cm
- Alto: 1.1 cm
- Peso: 8 gr
")
El módulo ULN2003 es un driver especialmente diseñado para manejar el motor a pasos 28BYJ-48 (unipolar). Adicionalmente puede ser usado para manejar Relays, motores DC o cualquier carga DC de bajo consumo de corriente.
Características:
Este kit consta de 37 sensores compatibles con arduino para que puedas realizar ampliaciones en tus proyectos. Podrás aprender y probar cómo funcionan cada uno de forma individual para expandir tus conocimientos. Cuenta con una amplia gama de sensores que pueden usarse para aprender el principio de funcionamiento de Arduino, como para desarrollar aplicaciones practicas de alto nivel. Entre los diferentes sensores que incluye se encuentran: sensores de temperatura, vibración, campo magnético, sonido, sensores IR, intensidad luminosa, inclinación y posición angular, flama, pulso cardiaco, impactos, obstáculos, etc. Además cuenta con módulos de control para diferentes aplicaciones por ejemplo: joystick, interruptor, relevador, interruptores magnéticos y módulos de comunicación visual de diferentes formas y tamaños.
Se entrega en caja de plástico con divisores para poder guardarlos cómodamente.
La función del cable macho-macho es con frecuencia usado en el tablero protoboard haciendo posible la conexión de dos elementos ingresados en dicho tablero. Se conoce como macho-macho debido al fragmento que sobresale de los extremos del cable.
Disponible en :
Macho – Macho.
Macho – Hembra.
Hembra – Hembra.
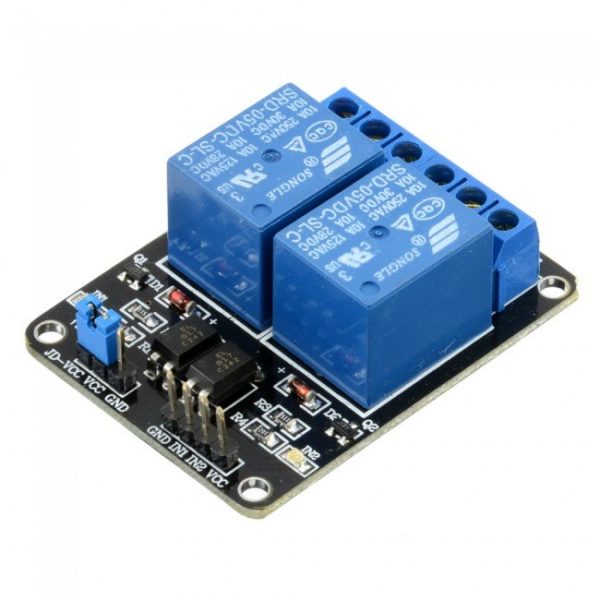
DESCRIPCIÓN:
Tarjeta de relés opto acoplada, incluye 2 canales para ser controlados en forma remota. Ideal para controlar dispositivos en el hogar o en la industria. Cada canal es controlado por una entrada TTL, la cual puede ser fácilmente controlada por un microcontrolador o Arduino. Esta placa requiere de una alimentación de 5V.
Características:
2 canales independientes protegidos con optoacopladores
2 Relés (Relays) de 1 polo 2 tiros
El voltaje de la bobina del relé es de 0 VDC
Led indicador para cada canal (enciende cuando la bobina del relé esta activa)
Activado mediante corriente: el circuito de control debe proveer una corriente de 15 a 20 mA
Puede controlado directamente por circuito lógicos
Terminales de conexión de tornillo (clemas)
Terminales de entrada de señal lógica con headers macho.